(%i2) "x-Vektor xvec"$
(%i3) xvec : transpose(matrix ([x,y,z]));
[ x ]
[ ]
(%o3) [ y ]
[ ]
[ z ]
(%i4) "Aufpunkt stuetzvec"$
(%i5) stuetzg : transpose(matrix ([1.0,2.0,3.0]));
[ 1.0 ]
[ ]
(%o5) [ 2.0 ]
[ ]
[ 3.0 ]
(%i6) "Richtungsvektor uvec"$
(%i7) uvecg : transpose(matrix ([-1.0,0.0,2.0]));
[ - 1.0 ]
[ ]
(%o7) [ 0.0 ]
[ ]
[ 2.0 ]
(%i8) "Geradengleichung g"$
(%i9) display(stuetzg + r * uvecg)$
[ 1.0 ] [ - 1.0 r ] [ 1.0 - 1.0 r ]
[ ] [ ] [ ]
[ 2.0 ] + [ 0.0 ] = [ 2.0 ]
[ ] [ ] [ ]
[ 3.0 ] [ 2.0 r ] [ 2.0 r + 3.0 ]
(%i10) g : stuetzg + r * uvecg$
- - - - -
(%i11) "x-Vektor xvec"$
(%i12) xvec : transpose(matrix ([x,y,z]));
[ x ]
[ ]
(%o12) [ y ]
[ ]
[ z ]
(%i13) "Aufpunkt stuetzvec"$
(%i14) stuetzh : transpose(matrix ([0.0,4.0,4.0]));
[ 0.0 ]
[ ]
(%o14) [ 4.0 ]
[ ]
[ 4.0 ]
(%i15) "Richtungsvektor uvec"$
(%i16) uvech : transpose(matrix ([0.0,-2.0,1.0]));
[ 0.0 ]
[ ]
(%o16) [ - 2.0 ]
[ ]
[ 1.0 ]
(%i17) "Geradengleichung g"$
(%i18) display(stuetzh + r * uvech)$
[ 0.0 ] [ 0.0 ] [ 0.0 ]
[ ] [ ] [ ]
[ 4.0 ] + [ - 2.0 r ] = [ 4.0 - 2.0 r ]
[ ] [ ] [ ]
[ 4.0 ] [ 1.0 r ] [ 1.0 r + 4.0 ]
(%i19) h : stuetzh + r * uvech$
- - - - -
(%i20) "a)"$
(%i21) "Schnittpunkt der Geraden g und h"$
(%i22) sp : transpose(matrix([ 0.000000000000, 2.000000000000, 5.000000000000]));
[ 0.0 ]
[ ]
(%o22) [ 2.0 ]
[ ]
[ 5.0 ]
(%i23) "Schnittwinkel alpha = 66.421821521798"$
(%i24) "b) Ebene, bestimmt durch g und h"$
(%i25) "Aufpunkt stuetzE"$
(%i26) stuetzE : transpose(matrix ([0.0,4.0,4.0]));
[ 0.0 ]
[ ]
(%o26) [ 4.0 ]
[ ]
[ 4.0 ]
(%i27) "Richtungsvektoren uvec und vvec"$
(%i28) uvecE : transpose(matrix ([-1.0,0.0,2.0]));
[ - 1.0 ]
[ ]
(%o28) [ 0.0 ]
[ ]
[ 2.0 ]
(%i29) vvecE : transpose(matrix ([0.0,-2.0,1.0]));
[ 0.0 ]
[ ]
(%o29) [ - 2.0 ]
[ ]
[ 1.0 ]
(%i30) "Ebenengleichung"$
(%i31) display(stuetzE + r * uvecE + s * vvecE)$
[ 0.0 ] [ - 1.0 r ] [ 0.0 ] [ - 1.0 r ]
[ ] [ ] [ ] [ ]
[ 4.0 ] + [ 0.0 ] + [ - 2.0 s ] = [ 4.0 - 2.0 s ]
[ ] [ ] [ ] [ ]
[ 4.0 ] [ 2.0 r ] [ 1.0 s ] [ 1.0 s + 2.0 r + 4.0 ]
(%i32) "c) Koordinatenform"$
(%i33) "2 z + y + 4 x = 12.0 "$
Normalenvektor
[ 4 ]
[ ]
(%o47) [ 1 ]
[ ]
[ 2 ]
(%i50) "Koordinatenform"$
(%i51) koordinatenform(xvec,nvecE,dE)$
2 z + y + 4 x = 12.0
(%i52) "Normalform"$
(%i53) display(xvec . nvecE)$
[ x ] [ 4 ]
[ ] [ ]
[ y ] . [ 1 ] = 2 z + y + 4 x
[ ] [ ]
[ z ] [ 2 ]
(%i54) xvec . nvecE - dE = 0;
(%o54) 2 z + y + 4 x - 12.0 = 0
(%i55) s1 : transpose(matrix ([x,0,0]))$
(%i56) s2 : transpose(matrix ([0,y,0]))$
(%i57) s3 : transpose(matrix ([0,0,z]))$
(%i58) spurpunkt(stmp,nvec,d,i) := . . . (Makro)
(%i59) "Spurpunkte"$
(%i60) "x-Achse"$
(%i61) spurpunkt(s1,nvecE,dE,1)$
[ 3 ]
[ ]
[ 0 ]
[ ]
[ 0 ]
(%i62) "y-Achse"$
(%i63) spurpunkt(s2,nvecE,dE,2)$
[ 0 ]
[ ]
[ 12 ]
[ ]
[ 0 ]
(%i64) "z-Achse"$
(%i65) spurpunkt(s3,nvecE,dE,3)$
[ 0 ]
[ ]
[ 0 ]
[ ]
[ 6 ]
(%i66) "Abstand der Ebene E vom Ursprung: d = 2.618614682832"$
(%i67) "d) "$
(%i68) "Punkt P"$
(%i69) P: transpose(matrix ([4.0,0.0,3.0]));
[ 4.0 ]
[ ]
(%o69) [ 0.0 ]
[ ]
[ 3.0 ]
(%i70) "Abstand Punkt P von Ebene E: d = 2.182178902360"$
(%i71) "Idee: Linearkombination, Antwort: a = 9,5"$
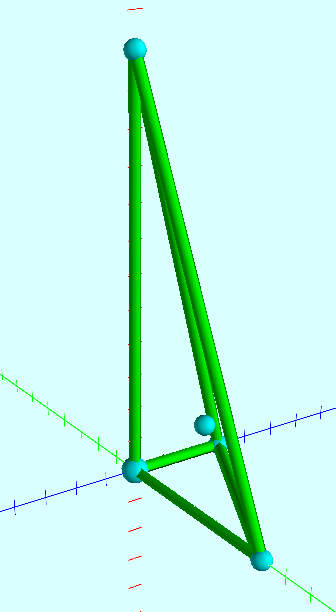
(%i72) "e) Volumen der Pyramide"$
(%i73) "Tetraeder (Punkte A, B, C, D)"$
(%i74) T1_A : transpose(matrix ([0.0,0.0,0.0]));
[ 0.0 ]
[ ]
(%o74) [ 0.0 ]
[ ]
[ 0.0 ]
(%i75) T1_B : transpose(matrix ([3.0,0.0,0.0]));
[ 3.0 ]
[ ]
(%o75) [ 0.0 ]
[ ]
[ 0.0 ]
(%i76) T1_C : transpose(matrix ([0.0,12.0,0.0]));
[ 0.0 ]
[ ]
(%o76) [ 12.0 ]
[ ]
[ 0.0 ]
(%i77) T1_D : transpose(matrix ([0.0,0.0,6.0]));
[ 0.0 ]
[ ]
(%o77) [ 0.0 ]
[ ]
[ 6.0 ]
(%i86) "Tetraeder T1"$
(%i87) "Oberflaeche O=104.243181254603"$
(%i88) "Volumen V= 36.000000000000"$
(%i89) "f)"$
(%i90) "Punkt R"$
(%i91) R: transpose(matrix ([1.0,2.0,2.0]));
[ 1.0 ]
[ ]
(%o91) [ 2.0 ]
[ ]
[ 2.0 ]
(%i92) "Laut Zeichnung (!) liegt der Punkt R(1|2|2) innerhalb der Pyramide"$